Einer der großen Fortschritte im Bereich des Maschinenbaus ist die Entwicklung von Rückwärtsengineering-Prozessen. Dabei handelt es sich um die Extraktion von Informationen direkt aus einem physischen System und deren Übersetzung in ein digitales Modell.
Rückwärtsengineering bietet viele Vorteile beim Modellieren und Simulieren eines Systems oder Produkts. Einerseits ermöglicht es, direkte Informationen aus dem Modell zu extrahieren, die zuverlässiger und von höherer Qualität sind, und andererseits beschleunigt und verkürzt es die Arbeitszeiten. Dadurch können komplexe Systeme zuverlässiger und in kürzerer Zeit modelliert werden.
Eines der Gebiete, in denen Rückwärtsengineering am erfolgreichsten angewendet wurde, ist die Messtechnik mit der Digitalisierung komplexer Geometrien.
3D-Scanner
3D-Scannen ist der Prozess der Umwandlung einer physischen Oberfläche in ein digitales Modell. Dabei wird die relative Position mehrerer Punkte auf dieser Oberfläche (Punktwolke) extrahiert und digital interpoliert, um die Geometrie des Teils wiederherzustellen.
Die Hauptparameter, die diese Punktwolke definieren, sind Auflösung und Genauigkeit. Die Auflösung wird durch den minimalen Abstand definiert, der zwischen zwei Punkten aufgelöst werden kann, und die Genauigkeit durch den Fehler bei der Bestimmung der realen Position jedes Punktes. Eine höhere Auflösung ermöglicht es, kleinere Details zu erfassen, während eine hohe Genauigkeit Modelle mit Dimensionen liefert, die der Realität näherkommen und daher kleinere Toleranzen aufweisen.
Geräte, die für diesen Zweck entwickelt wurden, werden als 3D-Scanner bezeichnet. Es gibt viele Arten, je nach ihrer Technologie, und sie können in zwei Hauptgruppen eingeteilt werden: Kontakt- und berührungslose Scanner.
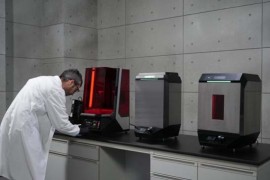
Kontakt-3D-Scanner sind wahrscheinlich am wenigsten verbreitet, obwohl sie zu den genauesten gehören. Sie bestehen aus einem Gelenkarm, normalerweise mit 6 Freiheitsgraden, mit einem Stift am Ende. Der Bediener fährt mit dem Stift über die Oberfläche, während Sensoren die Position mit einer bestimmten Frequenz aufzeichnen. Der Hauptnachteil dieser Technologie ist, dass der Bediener die gesamte Oberfläche mit dem Stift scannen muss, was ein sehr langsamer Prozess sein kann. Andererseits kann die Reibung des Stifts auf der Oberfläche die Oberfläche beschädigen, was bei archäologischen Artefakten oder Kunstwerken problematisch sein kann.

Bild 1: 3D-Scanner mit Faro-Kontakt. Quelle: Faro.com
Die berührungslosen Scanner basieren auf optischen Technologien und fallen in zwei Kategorien: passive Systeme und aktive Systeme.
Passive Systeme basieren hauptsächlich darauf, die geometrischen Informationen einer Oberfläche aus Fotografien zu extrahieren, die aus zwei definierten Blickwinkeln aufgenommen wurden, einer Technik, die als Stereoskopie bekannt ist und auf dem Parallaxeneffekt des menschlichen Sehens basiert. Ihr Hauptvorteil ist, dass sie große Oberflächen schnell und kostengünstig kartieren können, aber ihre Auflösung und Genauigkeit sind sehr gering. Außerdem ermöglichen sie keine Erfassung realer Messungen, sodass ein ergänzendes System erforderlich ist, das das Modell auf seine realen Abmessungen skalieren kann.
Die bekannteste passive 3D-Scanningtechnologie ist Photogrammetrie, die hauptsächlich für topografische Kartierung und Bauingenieurwesen verwendet wird. Sie wird in der Regel mit Satellitenpositionsdaten ergänzt, um genaue dimensionsbezogene Daten hinzuzufügen.
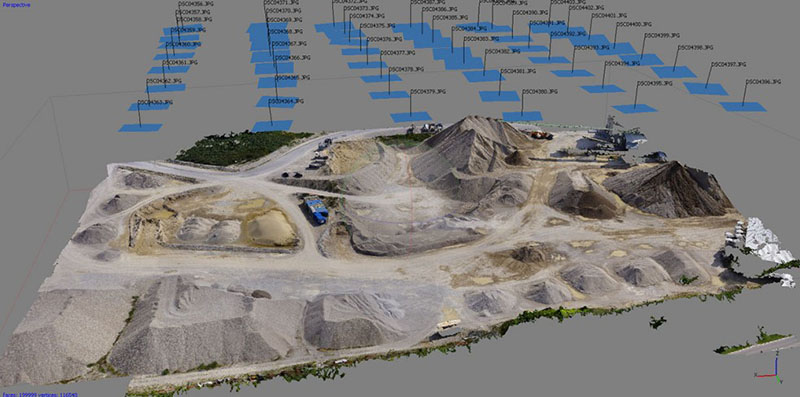
Bild 2: Topographisches Modell erstellt durch Photogrammetrie. Quelle: aamspi.com
Zuletzt gibt es die aktiven berührungslosen 3D-Scansysteme. Dies ist die größte Gruppe und die am weitesten verbreitete in Industrie, Kunst, Medizin und Unterhaltung.
Diese Art von System basiert auf der Messung eines Signals, das auf der Oberfläche ausgesendet wird. Obwohl jedes Signal verwendet werden kann, das mit der Oberfläche interagieren kann, wie Ultraschall, sind die gängigsten Systeme optisch.
Es gibt mehrere Technologien in dieser Kategorie, jedoch sind die vier bekanntesten: Time-of-Flight-3D-Scanner, Triangulations-3D-Scanner, Phasendifferenz-3D-Scanner und Strukturierte-Licht-3D-Scanner.
Time-of-Flight (ToF) 3D-Scanner: Basierend auf der Berechnung der Entfernung zur Oberfläche durch Messung der Zeit, die ein Impuls von Laserlicht benötigt, um zur Oberfläche und zurück zu gelangen. Er kombiniert eine große Reichweite mit einer hohen Frequenz der Punktaufnahme. Es wird hauptsächlich für die Kartierung großer Strukturen oder als metrologisches Werkzeug zur Bestimmung von Verformungen in Bauelementen verwendet. Heutzutage ist sein nichtprofessioneller Gebrauch dank seiner Implementierung in einigen Telefonen wie iPhones dank seines Lidarsensors alltäglich geworden.
Video 1: 3D-Scannen mit Tof-Technologie mit einem iPhone. Quelle: labs.laan.com
Triangulations- oder Laser-3D-Scanner: Sie bestehen aus einem Laseremitter und einem Fotodiodenarray-Sensor, der in einem bestimmten Winkel positioniert ist. Wenn der Laserstrahl auf die zu kartierende Oberfläche reflektiert wird, trifft er an einem bestimmten Punkt auf den Sensor, abhängig von der Entfernung zur Oberfläche. Dadurch ist es möglich, die Position des Punktes zu triangulieren, an dem der Laserstrahl auftritt. Dies ist ein der genauesten Systeme, jedoch hängt es vom Winkel ab, unter dem der Laser auf die Oberfläche trifft, sodass sehr kurze Arbeitsabstände erforderlich sind. Es eignet sich zur Kartierung kleiner bis mittelgroßer Objekte mit hoher Auflösung und Genauigkeit.
Video 2: Funktionsweise eines 3D-Triangulations-Scanners. Quelle: www.micro-epsilon.com
Phasendifferenzscanner: Dies ist eine intermediate Lösung zu den beiden vorherigen. Sie bestehen aus einem modulierten Laseremitter und einem Detektor und bestimmen die Entfernung zum Objekt, indem sie die Phase des ausgesendeten und empfangenen Lichts vergleichen. Sie haben einen guten Arbeitsabstand und eine mittlere Genauigkeit, was sie für die Kartierung großer Objekte mit guter Genauigkeit geeignet macht.
Strukturierte-Licht-Scanner: Wahrscheinlich heutzutage am häufigsten. Sie sind die vielseitigsten 3D-Scanner, weil sie eine ausgezeichnete Auflösung, hohe Genauigkeit, hohe Erfassungsgeschwindigkeit und niedrige Kosten kombinieren. Sie bestehen aus einer Kamera mit einem kalibrierten Objektiv und einem Projektor, der Lichtmuster auf die Oberfläche projiziert. Die Kamera erfasst Bilder der Deformationen dieser Muster auf der Oberfläche und generiert mithilfe komplexer Verarbeitungsalgorithmen die Punktwolke. Dieses System ermöglicht es, Hunderte von Punkten bei jedem Erfassen zu erhalten, sodass eine hohe Erfassungsgeschwindigkeit vorhanden ist. Darüber hinaus ist es je nach verwendetem Objektiv möglich, den Arbeitsabstand, die Präzision und die Auflösung anzupassen. Sie haben auch den Vorteil, dass viele Modelle, wie die von Thor3D, handgeführt verwendet werden können, ohne dass ein Stativ erforderlich ist. Ihr Hauptnachteil ist, dass sie empfindlich auf Umgebungslichtbedingungen und die Oberflächenbeschaffenheit des Teils sind, sodass das 3D-Scannen unter geeigneten Lichtverhältnissen erfolgen muss und im Fall von glänzenden oder transparenten Oberflächen möglicherweise eine spezielle matte Farbe aufgetragen werden muss.
Video 3: Calibry Structured Light 3D Scanner. Quelle: Thor3Dscanner.com
Punktwolkenverarbeitung
Im Allgemeinen erfassen 3D-Scansysteme keine kontinuierlichen Daten, sondern diskrete Positionen der zu erfassenden Oberfläche. Dies wird als Punktwolke bezeichnet. Die von 3D-Scannern erhaltene Punktwolke kann nicht direkt verwendet werden, daher sind mehrere Nachbearbeitungsaufgaben erforderlich, um die digitale Kopie zu erstellen.
Die endgültige Qualität des Modells hängt, neben der Ausgangspunktwolke von Qualität, von ihrer korrekten Verarbeitung ab. Dies erfordert Software mit guten Rekonstruktionsalgorithmen und etwas Wissen über die Verarbeitung von Punktwolken.
Zunächst einmal müssen, falls der 3D-Scan in mehreren Aufnahmen durchgeführt wurde, die verschiedenen Punktwolken ausgerichtet und zusammengeführt werden, um eine einzelne Wolke zu erhalten, die das gesamte Modell abdeckt. Die Genauigkeit beim Ausrichten der Punktwolken hängt weitgehend von den Verfolgungsmöglichkeiten des 3D-Scanners ab. Marker-Tracking ist immer am einfachsten auszurichten, jedoch gibt es Fälle, in denen Marker nicht verwendet werden können, wie zum Beispiel bei Kunstwerken. Für diese Fälle verfügen einige Scanner, wie Calibry oder Calibry Mini, über mehrere Tracking-Optionen, wie zum Beispiel Textur-Tracking.
Video 4: 3D-Scannen mit Markern. Quelle: Thor3Dscanner.com.
Als nächstes muss die Punktwolke gereinigt werden, indem Punkte entfernt werden, die nicht zur Oberfläche gehören, entweder weil sie zu Objekten in der Umgebung gehören oder weil sie aufgrund eines Fehlers im 3D-Scanner erscheinen. Ein hochwertiger 3D-Scanner zusammen mit einem guten Scannprozess liefert eine saubere Punktwolke mit wenigen oder keinen überflüssigen Punkten.
Nachdem die Punktwolke gereinigt wurde, muss sie rekonstruiert werden. Die Auswahl geeigneter Parameter liefert genaue und korrekt angepasste Netze.
Nach der Umwandlung der Punktwolke in ein Polygonnetz muss es überprüft und repariert werden. Eines der häufigsten Probleme ist in der Regel das Auftreten von Lücken im Netz aufgrund fehlender Daten während des Scannens. Die einzige Möglichkeit, diese Fehler zu reparieren, besteht darin, einen Patch durch Interpolation anzuwenden. Die Qualität der in der Software implementierten Interpolationsalgorithmen beeinflusst die Qualität der Rekonstruktion.
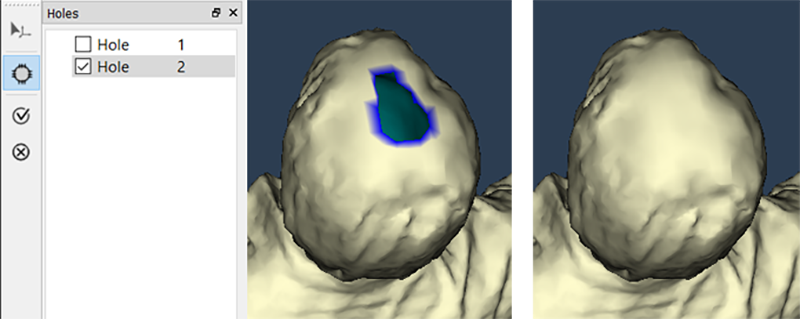
Bild 3: Reparatur eines Lochs im Netz mit Calibry Nest. Quelle: Thor3Dscanner.com.
Abschließend wird es notwendig sein, das Netz zu optimieren. Der Typ der Optimierung hängt weitgehend von der endgültigen Anwendung ab. Das Netz kann vereinfacht werden, indem die Auflösung zugunsten einer Reduzierung der Dateigröße geopfert wird. Die Vereinfachung des Netzes kann oft dazu beitragen, kleine Fehler zu korrigieren, um einfachere und homogenere Geometrien zu erreichen. Andererseits kann die Netzauflösung durch Interpolation neuer Elemente erhöht werden. Die Erhöhung der Netzauflösung erhöht jedoch nicht die Auflösung der Erfassung, jedoch kann sie dazu beitragen, eine größere Kontinuität und Glätte auf Oberflächen mit Krümmung zu erzielen.
Einige 3D-Scanner, wie solche, die auf strukturiertem Licht basieren, ermöglichen es, die Textur und Farbe von Oberflächen gleichzeitig durch Fotografien zu erfassen. Dies ermöglicht einen zusätzlichen Schritt im Verarbeitungsprozess, indem die Textur auf das Netz abgebildet wird. Dies ist besonders interessant für Anwendungen im Bereich Kunst und Unterhaltung.
Video 5: 3D-Texturmodell gescannt mit Calibry. Quelle: Thor3Dscanner.com.
Es gibt viele mögliche Anwendungen für 3D-Scanner in verschiedenen Industriebereichen. In der Medizin und Orthopädie können sie beispielsweise Teile des Körpers eines Patienten digital replizieren, um maßgeschneiderte Orthesen zu entwickeln. Im Unterhaltungsbereich wurden sie weit verbreitet in Film und Videospielen eingesetzt, um digitale Zwillinge von Schauspielern zu erstellen. Sie werden zunehmend in Kunst und Archäologie eingesetzt, um digitale Repliken von Kunstwerken und historischen Artefakten zu produzieren, die von Wissenschaftlern auf der ganzen Welt untersucht werden können. In der Ingenieurwissenschaft haben sie es erleichtert, Pläne für komplexe Teile zu erstellen, die Arbeitszeit zu reduzieren und genauere Modelle zu erhalten. In der Inspektion erleichtern sie den Vergleich der Geometrie eines Bauteils im Laufe der Zeit, um Verformungen zu erkennen, die dazu beitragen, Fehler zu verhindern.
3D-Scanner sind heutzutage ein unverzichtbares Werkzeug in vielen Bereichen. Die Entwicklung neuer Techniken, wie strukturiertem Licht, hat zu neuen 3D-Scannern geführt, die hohe Auflösung und Genauigkeit bieten, kombiniert mit hoher Datenakkumulationsgeschwindigkeit und einem wirtschaftlichen Preis. Beispiele sind die neuen Calibry- und Calibry-Mini-Scanner oder die EinScan-Serie von Shining.